ReAKTAGON: ReAKTAGON
![]()
![]()
Provare una nuova base per i TribeBots in modo tale che i motorini poggino direttamente sulla superfice di scivolamento.
Al seguente link il file in TinkerCad [[https://tinkercad.com/things/iVmCWJ4JPSD]]
Eseguiti test con MakeyMakey della Sparkfun.
Provata la sensibilità di una piantina in un vaso d'acqua. Toccando il gambo della pianta si ha una buona risposta da parte del MakeyMakey.
Quindi la Synesthetic Room utilizzerà un MakeyMakey.
Verrà creata una piccola base con carta di alluminio per il piano di massa.
Mancano però da costruire alcuni oggetti con il rame :
- ICOSAEDRO
- TETRAEDRO
- SFERA
I lati del Tetraedro e Icosaedro dovrebbero esser di circa 5 cm.
Costruiti un Ipercubo da moreno e un Dodecaedro da Benigno .
Testato l'ipercubo con libreria CapSense e Arduino UNO . La sensibilità al tocco a alla vicinanza di una mano è accettabile .
Prossime costruzioni : Tetraedro e Ottaedro.
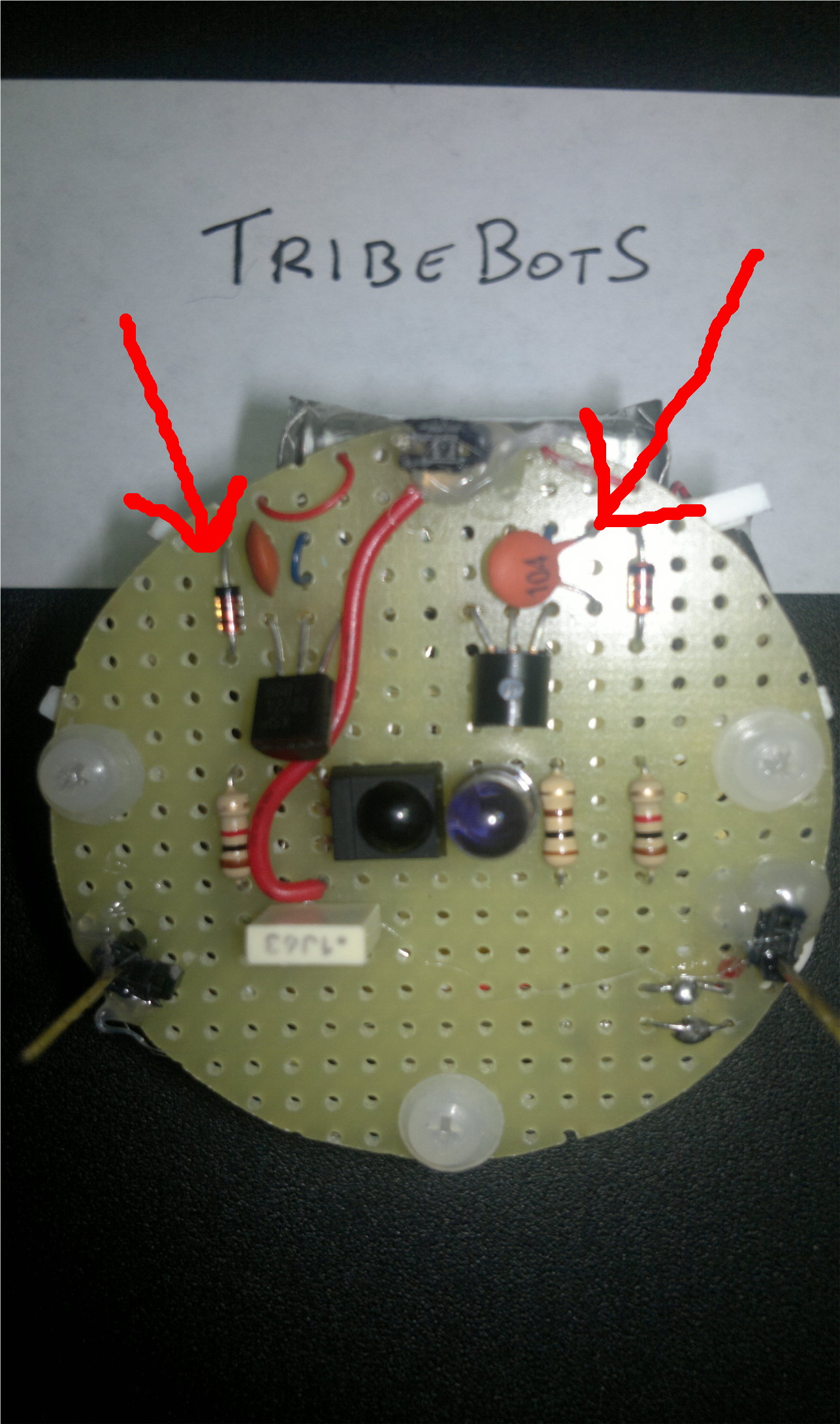
Al fine di proteggere i due transistor da eventuali spikes di corrente rilasciate dai motorini e diminuire i disturbi elettrici generati dagli stessi motorini ho inserito in parallelo due diodi 1N4007 e due condensatori ceramici da 0.1 microF (104) .
Per il momento ho testato vari azionamenti, velocità e stop con un telecomando e sembra funzionare bene.
Le rotazioni Destra e Sinistra dipendono un pò dalla superfice, dal punto di appoggio delle gambe e dalla loro inclinazione.
Devo provare a breve le comunicazioni fra due TribeBots.
TROMBA : http://scratch.mit.edu/projects/40825216/
SAX : http://scratch.mit.edu/projects/40824656/
CONTRABBASSO : http://scratch.mit.edu/projects/40824924/
PIANO : http://scratch.mit.edu/projects/40824188/
BATTERIA : http://scratch.mit.edu/projects/40825684/
Le immagini utilizzate sono state inviate da Francesca B.
Un pò di prove :
SAX : http://scratch.mit.edu/projects/39877486/
CONTRABBASSO: http://scratch.mit.edu/projects/39880386/
TROMBA: http://scratch.mit.edu/projects/39881472/
BATTERIA: http://scratch.mit.edu/projects/39884698/
PIANO: da fare
Le immagini utilizzate sono quelle linkate da Francesca B. .
Per i suoni sto utilizzando il generatore di suoni all'interno di Scratch, che però non è il massimo.
Valutiamo se sostituirli con i Campioni Audio di Andrea .
Qui una lista di strumenti che si possono simulare con Scratch : http://www.midi.org/techspecs/gm1sound.php
Una prima prova con Scratch : http://scratch.mit.edu/projects/37962654/
Interessante per progetti futuri l'utilizzo di questa scheda : http://www.picocricket.com/picoboard.html
Ho provato la trasmissione e ricezione in contemporanea tra due LiLyPad non originali. La lettura del segnale viene fatta sul pin 11 .
Dopo la trasmissione dell'informazione, la porta di lettura IR deve esser riabilitata con il comando "irRecv.enableIrIn();" ed occorre inserire subito dopo un ritardo di un certo valore x tra 60 e 80 delay per dare il tempo di esecuzione comando .
per dare il tempo di esecuzione comando .
Ci tengo a precisare che questo non sta scritto da nessuna parte, l'ho potuto constatare solo facendo prove sperimentali.
Su un LiLypad ho inserito un ritardo di 60 mentre su un altro ho dovuto metter un ritardo di 80 altrimenti la porta in lettura non si riattivava. Non so se questo può esser dovuto dal processore montato, forse ha caratteristiche e velocità di elaborazione leggermente diverse. Mi sembra strano però provando a cambiare il valore del ritardo in effetti il LiLypad funziona meglio.
Per concludere il test sembra aver dato esito POSITIVO, quindi per la logica di funzionamento e quindi appartenenza al gruppo "calmi o agitati" penso che si possa utilizzare questo metodo per comunicare.
Prossimo test sarà : Controllo motori e movimento del TribeBot .
Di seguito riporto il codice utilizzato per il test.
#include <IRremote.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
IRsend irsend;
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
if (results.value == 0xA80) {
digitalWrite(13,HIGH);
}
else
{
digitalWrite(13,LOW);
}
irrecv.resume(); // Receive the next value
}
delay(100);
for (int i = 0; i < 3; i++) {
irsend.sendSony(0xa70, 12); // Sony TV power code
delay(40);
}
irrecv.enableIRIn();// Start the receiver
delay(80); //!!! >>> Da adattare su ogni singolo LilyPad <<< !!!!
}
Sto effettuando delle prove con due LiLypad cinesi che Trasmettono e Ricevono entrambi contemporaneamente. Sto notando funzionamenti diversi a seconda del PIN di ricezione utilizzato. Ad es. sul pin 12 la lettura sembra esser instabile e disturbata mentre su il pin 8 è più stabile . Anche utilizzando dei filtri RC per i ricevitori TSOP le cose non cambiano.
Per i test sto utilizzando due PC Portatili in quanto ho comprato un altro cavo adattatore FTDI per leggere i dati sulla seriale.
Ho notato che la comunicazione seriale può provocare dei disturbi alla lettura del segnale, ma devo verificare meglio.
Qui lo schema dei test che sto conducendo : [[https://dev.hacklabterni.org/attachments/download/836/Test_1_TxRx_TribeBots.pdf]]
Esporta su Atom