TribeBots¶
- Table of contents
- TribeBots
Sistema di robots a basso costo per simulare interessanti comportamenti collettivi tipici dei batteri, insetti, uccelli, ecc.
Basato su un progetto chiamato "Kilobots", sviluppato da un gruppo di ricerca dell'Università di Harvard.
http://www.eecs.harvard.edu/ssr/projects/progSA/kilobot.html
Documentazione, schemi e codici disponibili qui
TribeBots al TERNI MAKER FESTIVAL 2015 - 28.03.2015
Obiettivi¶
Realizzazione di piccoli robots in grado di muoversi su una superfice liscia simulando movimenti di sciami di api, formiche, stormi di uccelli, ecc.
Ogni singolo TribeBot si muove grazie alle vibrazioni generate da due motorini vibranti. Le vibrazione vengono trasmesse a tre gambe rigide che fanno da supporto per tutta la struttura.
Al seguente link una simulazione del progetto : http://scratch.mit.edu/projects/30573872/
Requisiti principali¶
- muoversi avanti ;
- ruotare a destra o a sinistra;
- comunicare con i vicini TribeBots;
- ricevere dei comandi da un sistema di supervisione;
- costruzione mediante hardware economico;
Requisiti addizionali¶
- LED RGB che fornisce informazioni di funzionamento;
- Interruttore accendi/spegni;
- Ricezione comandi da un TribeBot "MADRE";
Ambiente di movimento¶
Superfice liscia, tipo lavagna bianca riflettente. La zona di movimento viene chiamata "Arena" .
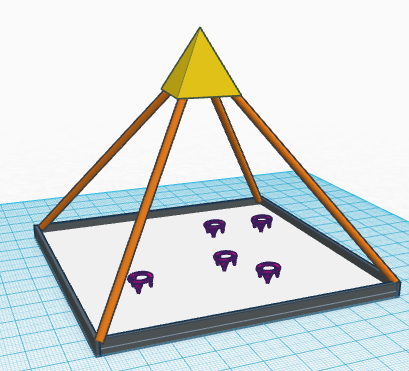
Arena Tribebot¶
Lista componenti¶
Staffe Angolari a L di plastica 2cm x 2cm x 2mt € 3.30
Tondini alluminio tondo forato 6mm x 1mt € 1.12
Supporto trasmettitore Bluetooth-Arduino-Infrarossi¶

Scarica o modifica da https://tinkercad.com/things/bdEpM3iq3zE
Cima piramide¶

Scarica o modifica da https://www.tinkercad.com/things/hWgyUdMidoU
Supporti tondini¶

Scarica o modifica da https://www.tinkercad.com/things/2FLqCNZFisI
Supporti staffe¶

Scarica o modifica da https://www.tinkercad.com/things/5Dmm2P3otfO
Movimento del TribebOt¶
Si ottiene utilizzando motorini vibranti che con la forza centripeta impongono lo spostamento in avanti del robot .
Il principio di spostamento è causato dal fenomeno dello "slip-stick" .
Qui di seguito alcuni link :
http://www.youtube.com/watch?v=3_WLrWh0-W0
http://www.fedoa.unina.it/1255/1/Di_Liberto.pdf
http://www.phy.davidson.edu/fachome/dmb/PY430/Friction/stick-slip.html
La vibrazione di un solo motorino causerà la rotazione in un senso sull'asse verticale, per cui ogni TribeBot potrà muoversi in avanti oppure girare a destra o a sinistra.
Da notare alcuni svantaggi dello "slip-stick" :
1. Odometria assente, per cui non è possibile misurare gli spazi percorsi;
2. Il TribeBot può muoversi solo su superfici liscie.
Base TribeBot¶
Comunicazioni e Sensoristica¶
I TribeBots comunicano tra di loro tramite trasmettitori ad infrarossi (IR LED) . Possono ricevere segnali IR da un supervisore.
Il LED trasmettitore ha una emissione isotropa per cui il ricevitore IR leggerà le informazioni da tutte le direzioni .
Il TribeBot può trasmettere informazioni fino a 10 cm di distanza .
Lo scambio di informazioni dovrebbe esser gestito utilizzando il protocollo CSMA/CA ( http://it.wikipedia.org/wiki/CSMA/CA ) al fine di evitare che due o più robots trasmettino messaggi in contemporanea.
Prototipo¶
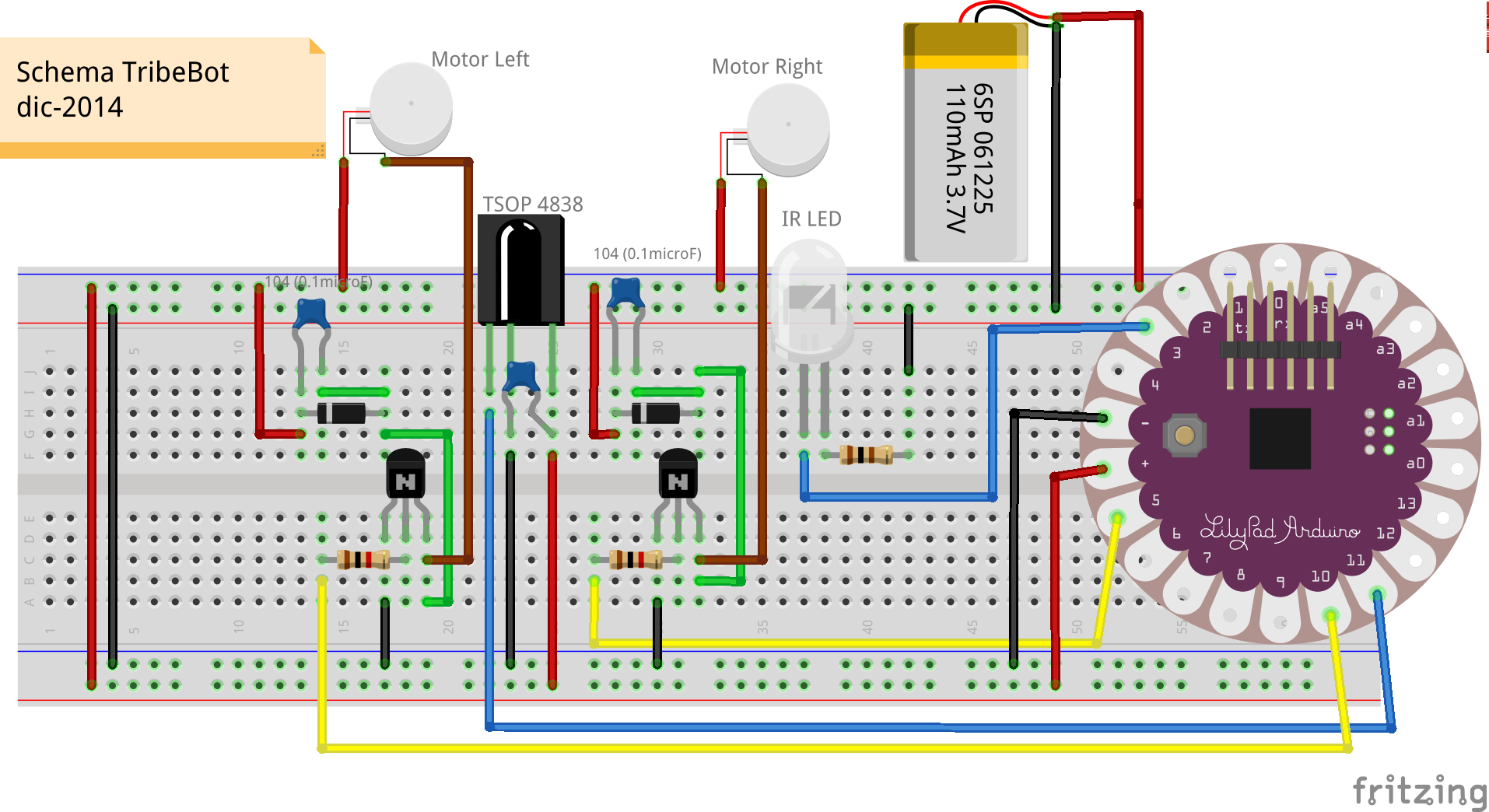
Schema Board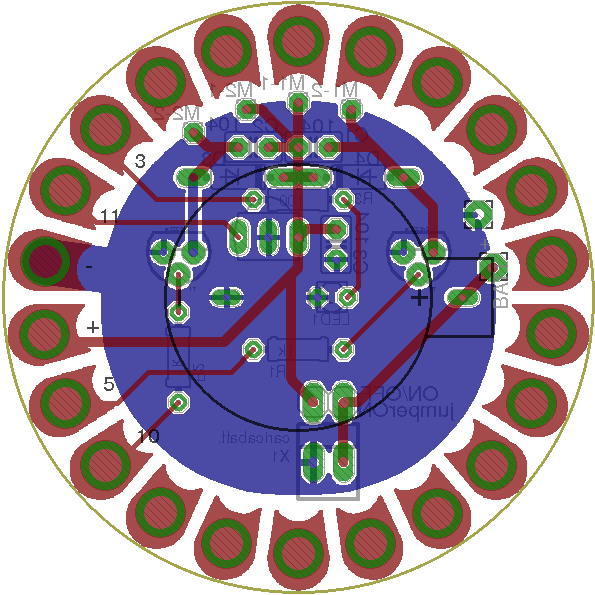
Eagle File rev1.1
[[https://dev.hacklabterni.org/attachments/download/1126/TribeBot21.zip]]