Arduino Manobot¶
CHE COS’E’
Abbiamo realizzato una mano robotizzata, utilizzando materiali economici e
semplici da reperire, in grado di replicare i movimenti delle dita di un utente
che indossa un guanto sul quale sono stati montati dei sensori di flessione.
Ad ogni singolo dito è stata associata una nota musicale riprodotta ogni
qualvolta che si fletterà un dito .
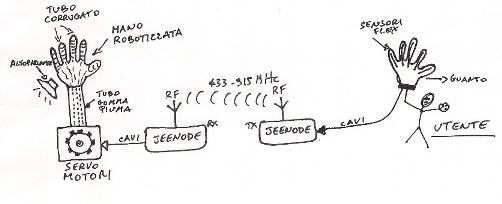
Il sistema è composto da: una mano costruita con del tubo corrugato flessibile
e azionata da 5 Servomotori; un guanto sul quale sono stati montati 5 sensori
di flessione; una scheda Arduino Uno con ProtoShield sul quale è stato
realizzato un partitore di tensione per il rilevamento delle variazioni di
resistenza dei singoli sensori di flessione.
SCHEMA CONCETTUALE
Componenti principali per il guanto
Nr. 5 Sensori di flessione, cavo rigido, nastro isolante.
Componenti principali per la mano robotizzata
Nr. 5 Servomotori mod. HS-55, tubo corrugato diametro 10 mm , filo di nylon 0,30 , tubo di
gommapiuma, altoparlante 8 ohm, nastro isolante, scatola elettrica per montaggio
servomotori.
Componenti principali Arduino
Arduino UNO, ProtoShield, Libreria Servo per azionamento Servomotori, Sketch per
Arduino.
PROTOSHIELD per Partitore di Tensione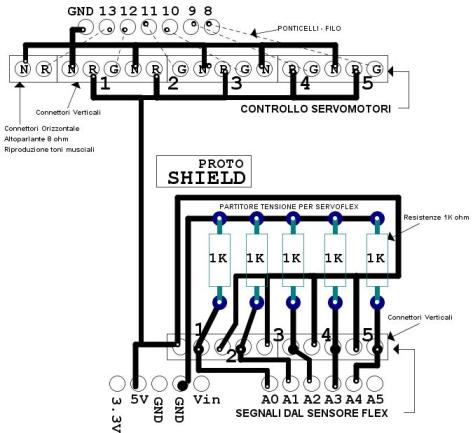
Sulla ProtoShield è stato realizzato un partitore di tensione per poter misurare la
variazione di resistenza del sensore di flessione.
SVILUPPI FUTURI
Controllare i servomotori via radio con l’utilizzo di JeeNodes
in quanto basati su processore Atmel ATmega ATmega328 .