Realizziamo la struttura¶
- Table of contents
- Realizziamo la struttura
Facciamo le zampe¶
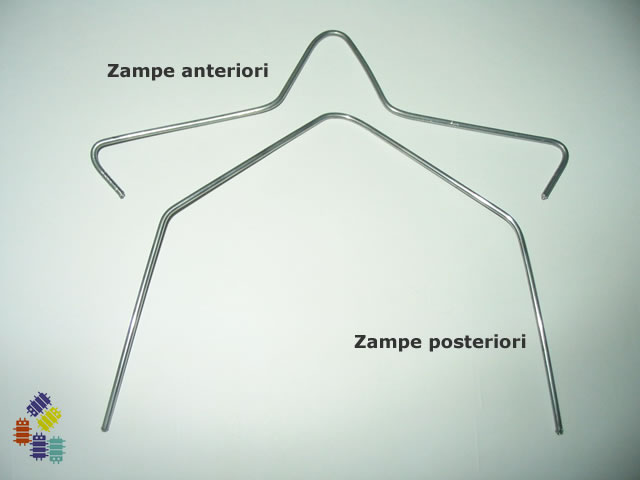
Tagliamo due pezzi di filo metallico del tipo utilizzato per le grucce appendiabiti: uno da 25 cm per le zampe anteriori e uno da 28 cm per le zampe posteriori. Con l'aiuto di due pinze, pieghiamo le zampe nella forma illustrata nella foto.
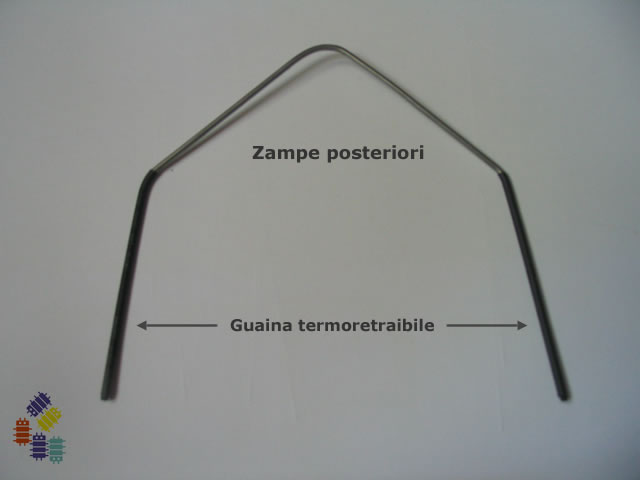
Per migliorare l'aderenza delle zampe le rivestiamo con una guaina termoretraibile: ne tagliamo due pezzi lunghi 7 cm, inseriamo le estremità delle zampe posteriori e li scaldiamo con un accendino per farli aderire al filo metallico.
 |
Per migliorare ulteriormente la presa delle zampe anteriori, le ricopriamo con una gommina. Abbiamo utilizzato Oogoo, la ricetta su Instructables. |
Ora possiamo attaccare le zampe ai motori. Utilizziamo l'accessorio a forma di croce come base per collegare le zampe all'asse del motore. Fissiamo le zampe ai bracci della croce con del filo metallico servendoci dei piccoli fori lungo i bracci stessi.
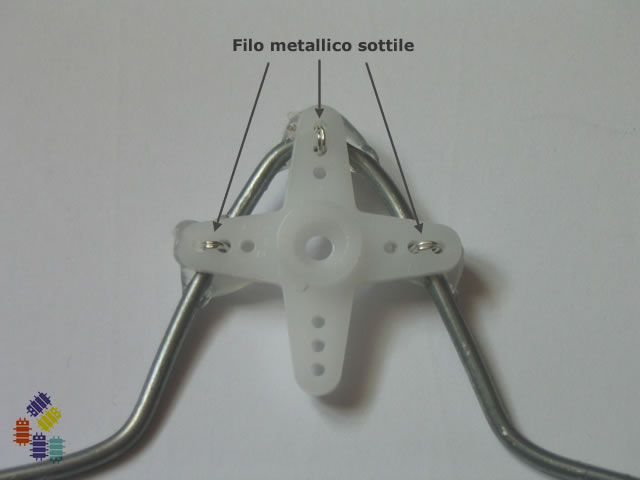
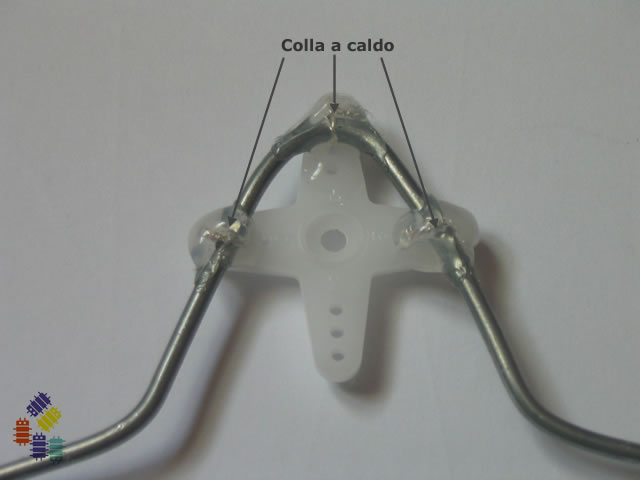
Passiamo le estremità dei fili dal lato esterno della croce e stringiamo bene, poi torciamo le due estremità alcune volte ed eliminiamo l'eventuale eccesso. Per rendere le zampe più stabili, fissiamo i punti di unione ai bracci con la colla a caldo.
Assembliamo il corpo¶
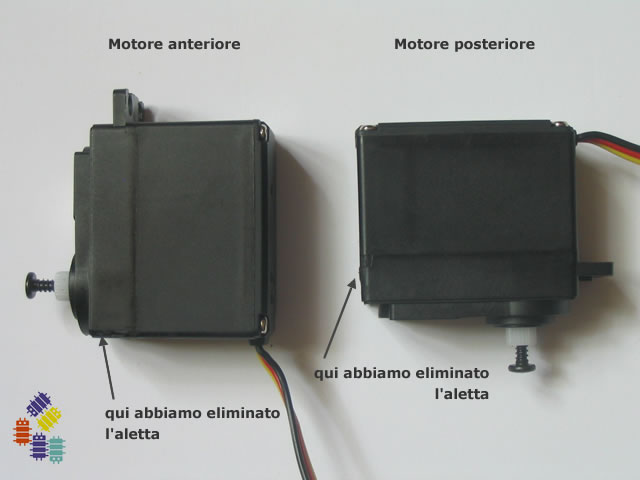
Il corpo dell'insetto è formato da due motori servo incollati fra loro: per poterli unire dobbiamo prima rimuovere l'aletta di plastica vicino al mozzo dal motore anteriore e l'aletta più lontana dal mozzo dal motore posteriore. Per questa operazione utilizziamo un mini trapano con un disco da taglio.
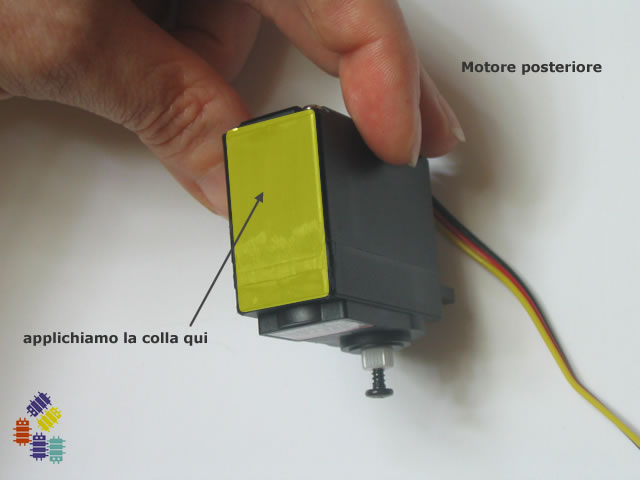
Controlliamo che la superficie dove si trova il taglio sia liscia prima di stendere la colla a caldo. Applichiamo la colla al motore posteriore...
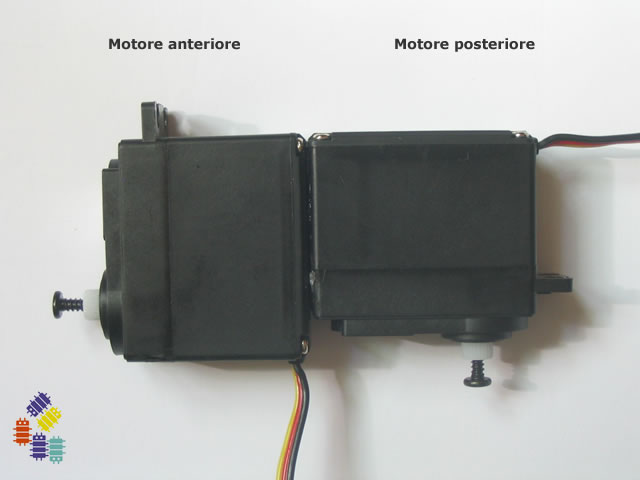
... e premiamo i due motori fra loro per farli aderire bene. Il mozzo del motore anteriore deve essere rivolto in avanti e trovarsi nella parte inferiore, l'aletta di plastica del motore rimasta punta in alto e i fili in basso, mentre il mozzo del motore posteriore deve essere rivolto in basso e trovarsi nella parte posteriore, l'aletta di plastica del motore rimasta e i fili puntano indietro. Assicuriamoci che le superfici superiori dei motori siano ben allineate.
| In caso di attività prolungata, il calore generato dai motori può ammorbidire la colla e provocare un drammatico distacco dei componenti. |
Uniamo un porta batteria¶
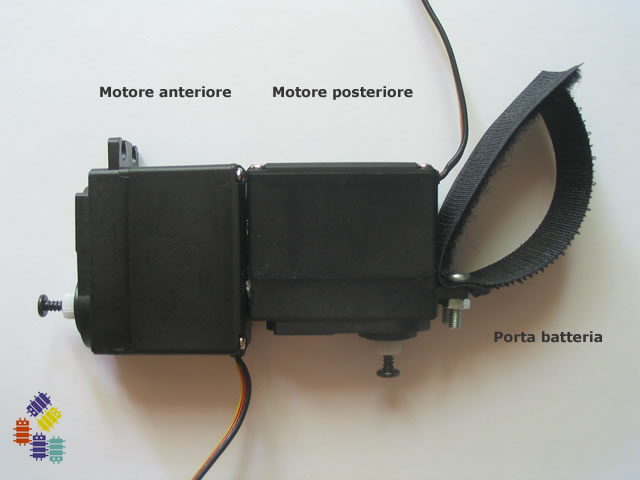
Il robot è alimentato da una batteria 9V. Realizziamo un porta batteria con una striscia di Velcro: uniamo le due parti della striscia su un lato corto in modo da poterle poi chiudere ad anello. Pratichiamo due fori dove le due parti si sovrappongono controllando la posizione con le cavità dell'aletta del motore posteriore e fissiamo la striscia all'aletta con due bulloni.
Applichiamo un supporto per Arduino¶
Per collocare Arduino sul dorso dell'insetto utilizziamo una base di plastica. Controlliamo la posizione dei fori su Arduino e pratichiamo dei fori in corrispondenza sulla base.

Per poter gestire l'alimentazione del robot utilizziamo un interruttore. Pratichiamo tre fori sulla base per posizionare l'interruttore.

Per attaccare la base ai motori in questa fase utilizzeremo gommini adesivi in modo da poter rimuovere la base per effettuare eventuali altri interventi e riposizionarla.

Montiamo la struttura¶
Avvitiamo Arduino alla base con le viti di plastica, i distanziatori, le rondelle e i dadi. Con l'aiuto di una pinza eliminiamo la parte eccedente delle viti.
Attacchiamo le zampe ai motori senza serrare ancora le viti.

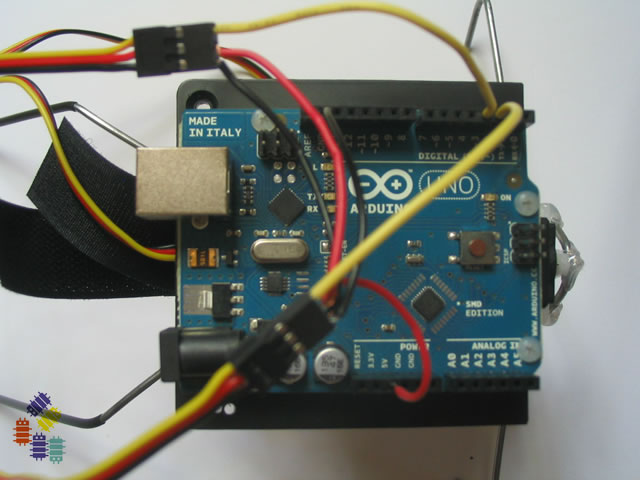
Colleghiamo fra loro i fili di massa (neri) dei motori con un ponticello, poi utilizziamo un altro ponticello per collegare uno dei motori a un pin GND di Arduino.
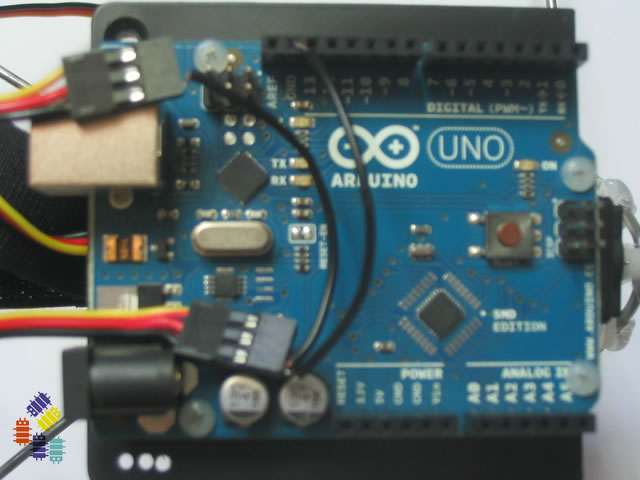
Colleghiamo fra loro i fili di alimentazione (rossi) dei motori con un ponticello, poi utilizziamo un altro ponticello per collegare uno dei motori al pin di alimentazione 5V di Arduino.

Colleghiamo il filo di controllo (giallo) del motore posteriore al pin 2 di Arduino con un ponticello, poi allo stesso modo colleghiamo il motore anteriore al pin 3.
Saldiamo il piedino centrale dell'interruttore al filo del positivo (rosso) della clip per la batteria e un piedino esterno ad un ponticello rosso. Fissiamo l'interruttore al supporto con la colla.

 |
Per avere collegamenti più stabili ed evitare che i fili possano staccarsi, abbiamo saldato le estremità dei ponticelli da collegare accoppiati e quelle dei fili con le estremità più sottili ad alcuni morsetti. |
Fissiamo le zampe¶
Ora possiamo centrare i motori: utilizzando il codice twoServosCenter.pde (dal sito “Make: Arduino Bots and Gadgets”) possiamo centrare entrambi i motori contemporaneamente.
Una volta che i mozzi sono in posizione centrale, controlliamo che le zampe siano ben centrate e avvitiamole
definitivamente. Montiamo anche la batteria e sistemiamo le zampe in modo che il robot sia ben equilibrato.

Riferimenti¶
Make: Arduino Bots and Gadgets, by Kimmo Karvinen and Tero Karvinen (O’Reilly). Copyright 2011 O’Reilly Media, 978-1-449-38971-0.
Make: Arduino Bots and GadgetsInstructables - How To Make Your Own Sugru Substitute