Drone (QuadRotor)¶
- Table of contents
- Drone (QuadRotor)
Questo è il Flight Controller Flip32
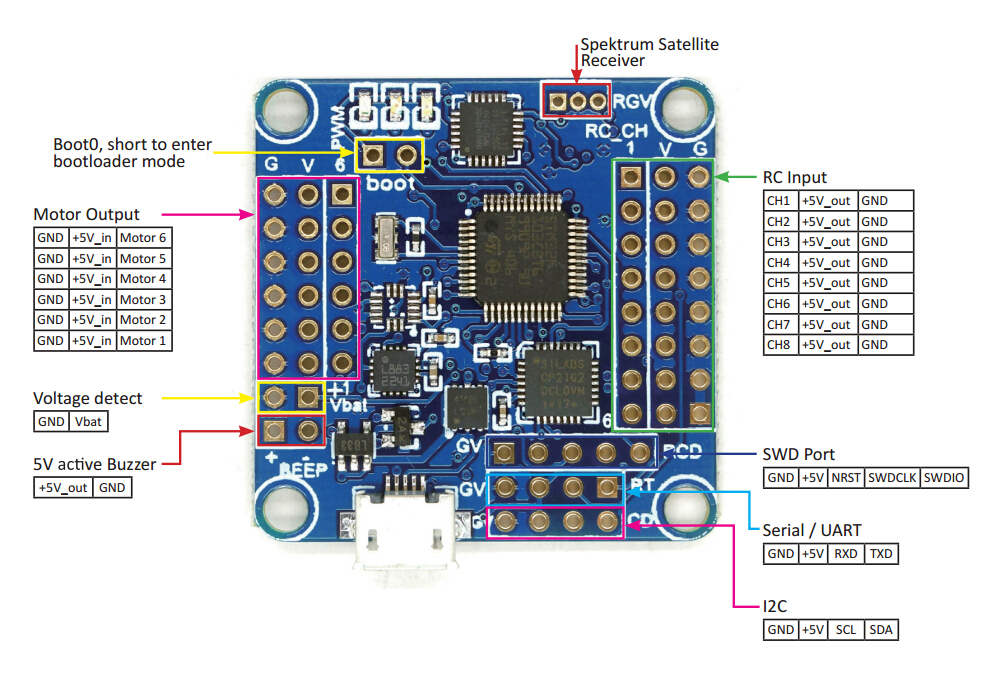
Flip32 Features:¶
- 3-axis MEMS gyro+accelerometer(MPU6050)
- 3-axis magenetometer (HMC5883L)
- Pressure sensor (MS5611)
- Flexible motor output,support various airframe types
- Quad/Hexa/Tri/Bi/Y4/Y6/Octo/Camera Gimbal(Default is Quad-X)
- Up to 8 ch RC input-supports standrad receivers(PWM),PPM Sum receiver(FrSky,etc),or Spektrum Stellite receiver
- Battery voltage monitoring
- Modern 32 processor running at3.3V/72MHz(STM32F103CB)
- Onboard MicroUSB for setup and configuration
- MultiWii-based configuration software for easy set up
- reV4 hardware
How To, guide e manuali¶
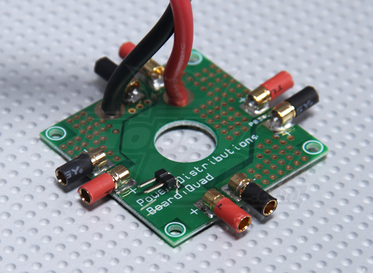
Parti essenziali per il QuadRotor (oltre al F.C.)¶
1 frame (diy in alluminio o stampato o fresato ...)
4 motori brushless
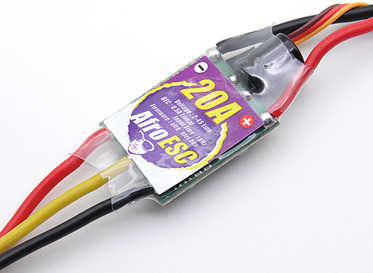
4 ESC (Electronic Speed Controller)
4 eliche (2 CW 2 CCW)
1 batteria LIPO da 3 celle adeguata
Lista della spesa¶






Work in Progress¶

Serve altro¶
Servirebbe anche un radiocomando ma, visto che sono costosi, potrebbe essere sostituito usando una scheda wifi per ricevere i comandi da pc, tablet o smartphone e per inviare il flusso video di una eventuale telecamera da mettere a bordo.
Altri link interessanti¶
- MultiWii (Cleanflight) WiFi to EZ-GUI HOW-TO – ESP8266
- A free android app for controlling a multiwii copter
- Handles the MultiWii Serial Protocol to send and receive data from boards
- programmatore x ESC
TODO¶
Collegare il controllo carica batteria e il buzzer
(Voltage Detect e Buzzer su Flip32)
Materiali Utili¶
- 1 Pz Header Pin Maschio 2.54 3*40
- 3 Pz Header Pin Maschio 2.54 2*40
- 6 Pz Header Pin Maschio 2.54 1*40