Drawing Robot¶
- Table of contents
- Drawing Robot
Premessa¶
Progetto per lo sviluppo di piccoli robot controllabili via bluetooth in grado di muoversi e disegnare sul piano in cui si muovono, volto ad introdurre un nuovo argomento per i Makerdojo.
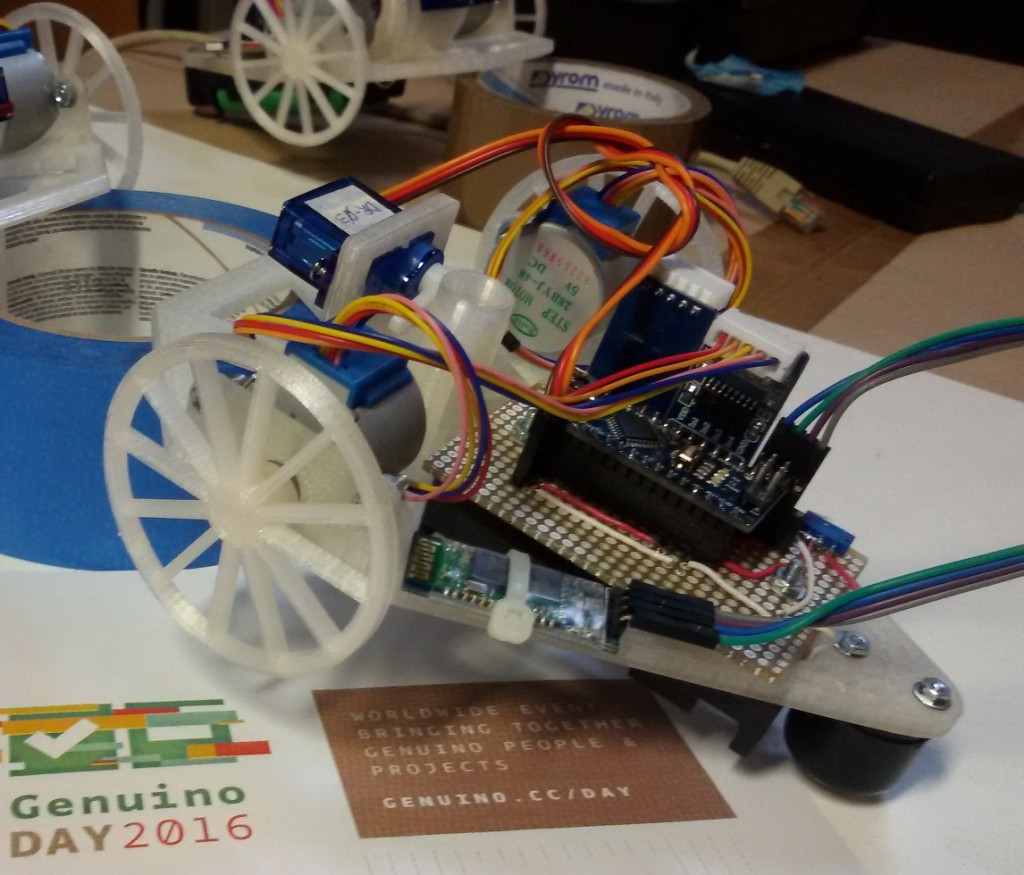
L'idea è quella di usare dei motori stepper con riduzione 28BYJ-48 (molto economici, semplici da usare, permettono movimenti abbastanza precisi) per il movimento e un piccolo servomotore per posizione penna su o penna giù.
Il collegamento bluetooth, visto come una seriale dal PC, permette di programmare l'Arduino (o similari, magari le schedine sparkfun) che controlla il robot o dall'IDE o da Scratch.
Si immagina una situazione del genere: 4 o 5 di questi robottini a terra su un grande foglio di carta, altrettante postazioni PC con Scratch dalle quali i bambini / ragazzi programmano il movimento dei robot e realizzano disegni.
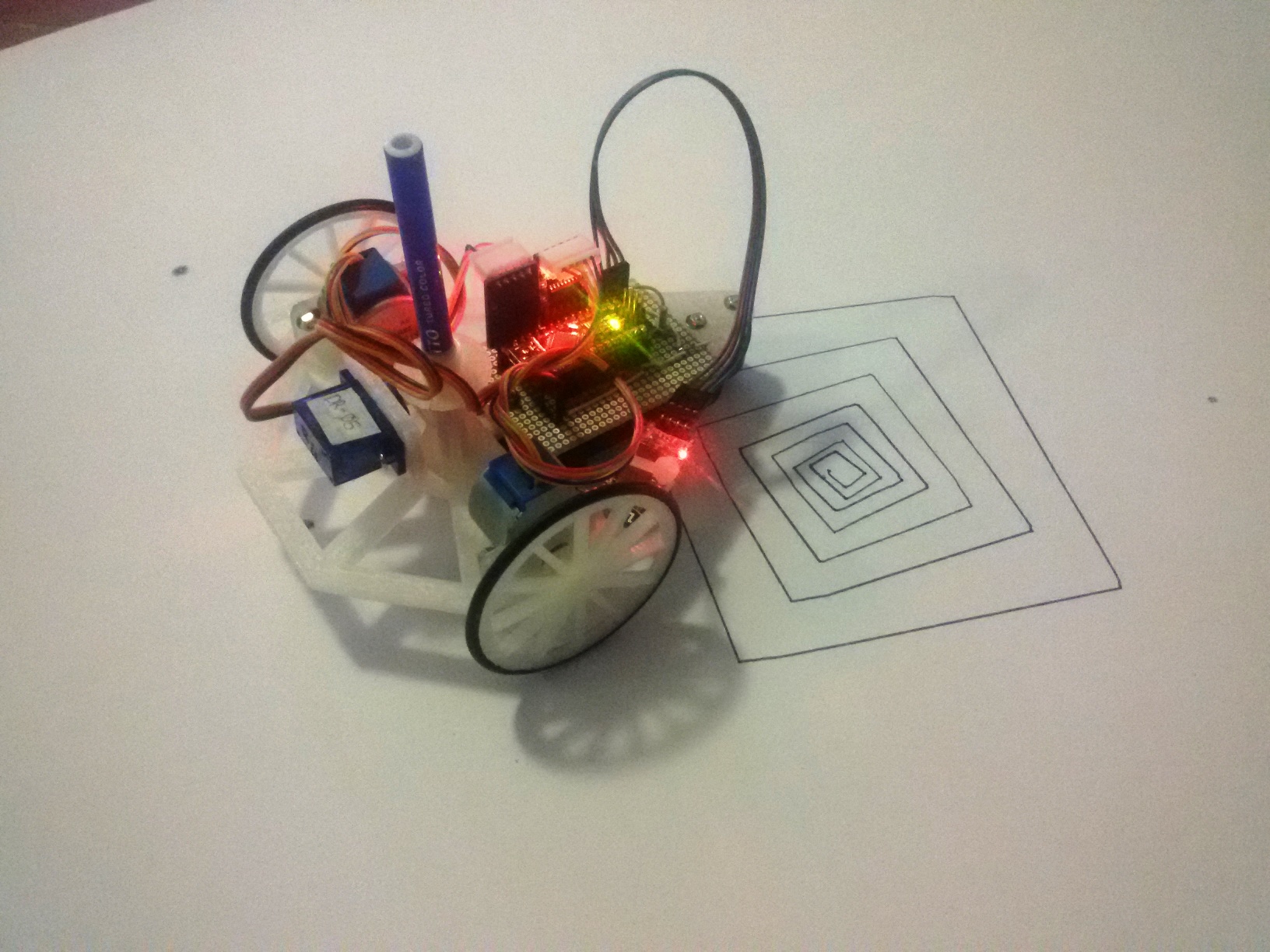
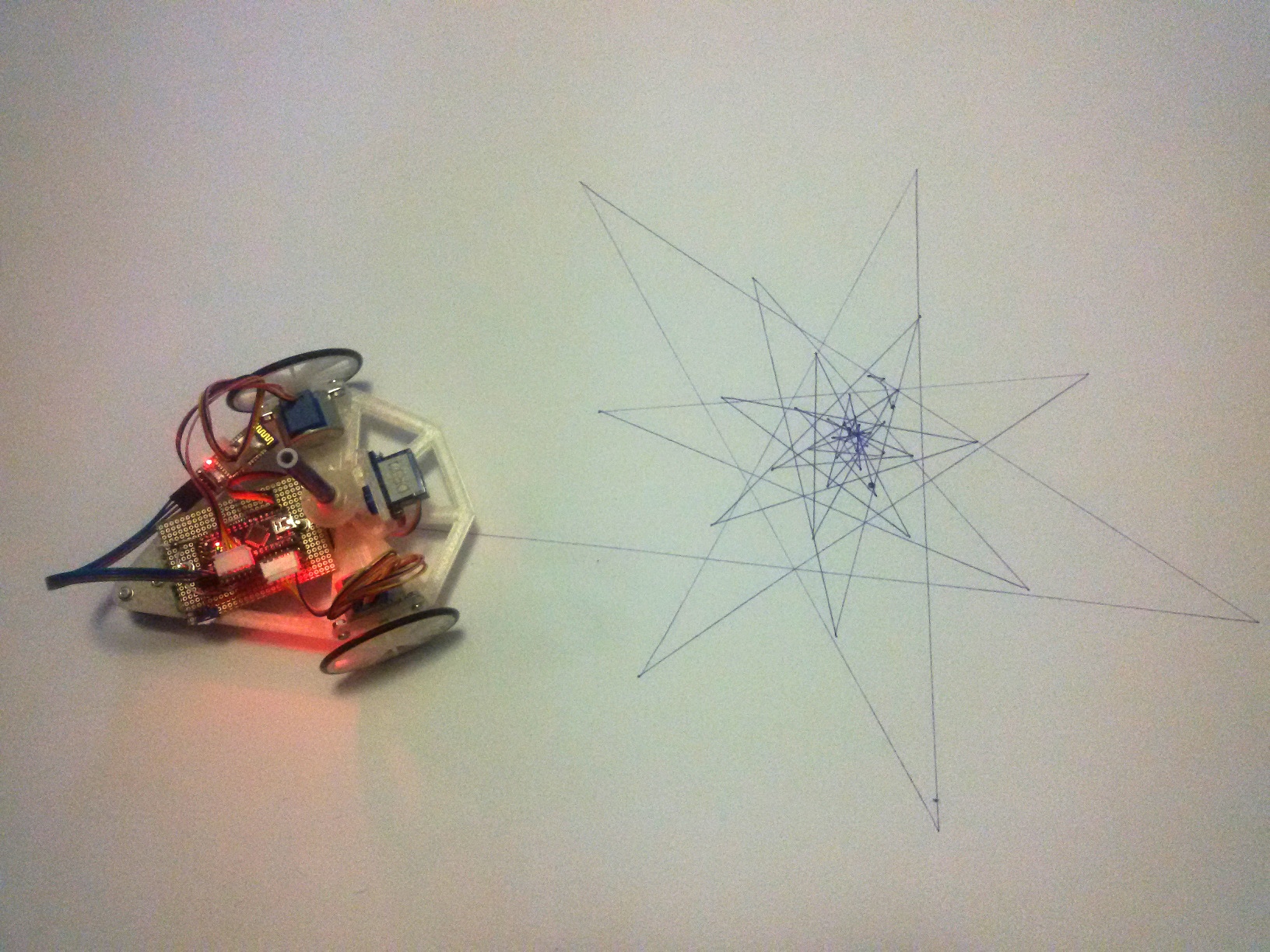
Con istruzioni semplici tipo muovi avanti di N cm, gira a dx o sx di A gradi inserite in loop si possono generare disegni molto carini tipo spirali di vario tipo o oggetti frattali:
esempi da Google immagini.
Nei link che seguono c'è una realizzazione molto simile a come l'avevo immaginata, d'altronde sia noi che l'autore dell'instructable abbiamo copiato l'idea dalla Turtle Graphics del Logo, un sistema sviluppato negli anni 80 per insegnare l'informatica ai bambini da Seymour Papert.
[[http://hackaday.com/2015/10/24/low-cost-arduino-compatible-drawing-robot/]]
[[http://www.instructables.com/id/Low-Cost-Arduino-Compatible-Drawing-Robot/]]
Dal progetto su instructables si può copiare tutta la parte della struttura, della meccanica e dei motori, per la parte elettronica si può usare un'altra variante di Arduino (le schede SparkFun - ne abbiamo tante) ed una schedina bluetooth seriale tipo HC-05. Molto interessante nel progetto instructables è la lista dei componenti della struttura del robot, tutti stampabili e liberamente scaricabili da Thingiverse.
- 1 x Ball bearing caster
- 1 x Chassis
- 2 x Wheels
- 2 x Stepper bracket
- 1 x Pen Holder / servo bracket
- 1 x Pen Collar
Sorgenti e modelli 3D da stampare.¶
Video del primo prototipo¶
Foto della versione definitiva¶